

JShell API, design problems?
This weekend I continued working my project making a Java REPL adventure game that teaches the basics of programming (in Java). One main goal of starting this project was to get a better understanding of the JShell API, not just the tool. I’ve used the JDK 9 JShell command line tool before, and it worked great. But there is also a big API behind it you can programatically use.
Fantasy names using Java JShell
I’ve been a big fan of the Java JShell from the early beginning. I was even the first one on the mailing list besides the people from Oracle. I’m working on a weekend/side project involving JavaFX and JShell API now for a couple of days and something was bothering me.
The project I’m working on is targetted at teaching kids to learn Java Programming in a fun way. But automaticly generated variable names called $1, $2, $3 etc are not ‘fun’ enough! Luckily I found the following method in the API:
Getting to grips with Gatling: Custom Feeder
About a year ago someone on my current project did an initial setup of Gatling. This is a performance/stress test tool written in Scala, it is easy to use but very powerful. The basic idea is that you write the test scenario’s in code, the same way as you would create integration/unit tests. The advantage is that the resulting tests are easy to expand, maintain and you’ve got everything under version control.
One very powerful feature Gatling has is the Recorder. It is an application you can launch and it acts like a proxy server. Being a proxy...

Keep the Force asleep
At the moment it is very hard for an online nerd on Twitter. Star Wars ep 7: The Force Awakens has been released into the wild and most of us haven’t seen it yet. But luckely there is a solution, I’ve created a handy bookmarklet.
A bookmarklet is a piece of Javascript code that you can add as a bookmark. When you are on a certain website (like Twitter) you can press the bookmarklet and the Javascript is executed. The bookmarklet code I’m using has been created using this great website: DeClutter Twitter and it removes most Star...

Google Guava: Range with LocalDate
This afternoon I was working on implementing a user story with (JodaTime) LocalDate ranges. The problem? I needed to represent a lot of periods, in days. The thing I needed to check: Is a certain LocalDate contained in this period.
First I started looking at JodaTime itself, it has support for Interval(s). But there is a ‘problem’, Interval is based around ReadableInstants, and LocalDate is a ReadablePartial, not a ReadableInstant! So to make my code work I had to do the following:

Makeblock, robots for kids (and adults)
When I left the Port of Rotterdam (over a year ago) as consultant/software developer I got a lot of cool gifts. Amongst the gifts was a small blue box from Makeblock, called the ‘robot starter kit’. It was put away on my desk and sadly I’d forgotten about it. But recently a colleague of mine showed us the robot his daughter made. She got a similar robot from Makeblock for her birthday and it ‘became her new best friend’. He asked her if he could borrow the robot for one day and show it to us at work, she...

Hacking a broken Roomba (with Raspberry Pi)
 Every couple of weeks we organize a hack-day at work. Being a (Java) software consulting company we usually work on exploring new Java frameworks or we contribute to open source projects. But more and more we step out of just software and bring Raspberry Pi’s and other hardware. Another example where we hacked on hardware is playing with Software Defined Radio (SDR), my colleague Bert Jan did a talk about this at Devoxx 2015.
Every couple of weeks we organize a hack-day at work. Being a (Java) software consulting company we usually work on exploring new Java frameworks or we contribute to open source projects. But more and more we step out of just software and bring Raspberry Pi’s and other hardware. Another example where we hacked on hardware is playing with Software Defined Radio (SDR), my colleague Bert Jan did a talk about this at Devoxx 2015.
Broken Roomba
A couple of days before our last hack-day my wife was carrying our old ‘broken’ Roomba vacuuming...

If you want to build software...
Yesterday I heard a great quote:
If you want to build a ship, don’t drum up people to collect wood and don’t assign them tasks and work, but rather teach them to long for the endless immensity of the sea. -Antoine de Saint-Exupery
To the moon
The modern version of this quote might be: Think about the people who helped build the Saturn rockets that took us to the moon with the Apollo missions. They didn’t work on those projects because it was their job and people payed them to do it. They didn’t just follow tasks....
The most discriminating JUG in the world
About a week ago I was talking to a colleague about the lack of female Java programmers, especially here in Western Europe. We came to this topic after hearing that at Devoxx Morocco almost a third of the attendees was female, great news! The conclusion? Some of my friends are running the most discriminating JUG in the world.
Here, in the Netherlands, we have just two big JUG’s (Java User Groups). There is the NLJUG, which covers the entire country and organises the J-Fall conference amongst other things, almost all Java coders in the Netherlands are a member....

JavaOne 2015 and Devoxx 2015
The last couple of weeks have been really busy for me. I’ve been to San Francisco for JavaOne 2015 (the official Java conference). After that I had just a week to recover and travelled to Antwerp in Belgium for Devoxx 2015 (the largest community driven conference).
Talking
At both conferences I had the pleasure to talk about different subjects. From fun/informal Ignite sessions about Skynet and Joggling to hosting a Java Pub Quiz and a live-coding introduction to JShell the new REPL (read-eval-print loop) that will be available in Java 9.
Here is a video of the...

Microservices: Creationism versus Evolutionism
This morning a friend (@vgrgic) tweeted the following quote from Martin Fowler:
“So if you can keep your system simple enough to avoid the need for microservices: do.”
This is absolutely true I think, microservices are far from the silver bullet some people want you to believe. They do have a place in software architecture obviously, but there is always a ‘it depends’.
Creationists
A lot of microservices ‘experts’ I’ve met are creationists. When they start designing an application (the last two years), they break the requirements down into pieces. Once they start coding they instantly...

Stop the conference committees?
In this post I’ll try to convince you that all the conferences are doing it wrong. JavaOne, Devoxx, and all other conferences should stop using conference program committees to select their speakers, there is a much better way.
Call for Papers
Some of you know I enjoy speaking in public and I’ve done so at many conferences. To get selected to speak at a conference you’ll need to supply a ‘paper’ to the Call for Papers (CfP). In this paper you outline the content of your talk and provide some information about yourself as speaker.
Once all...

The science behind 'Unknown Pleasures'
Joy Division
The album cover of Unknown Pleasures by Joy Division has to be one of the most iconic covers of the 70’s/early 80’s:
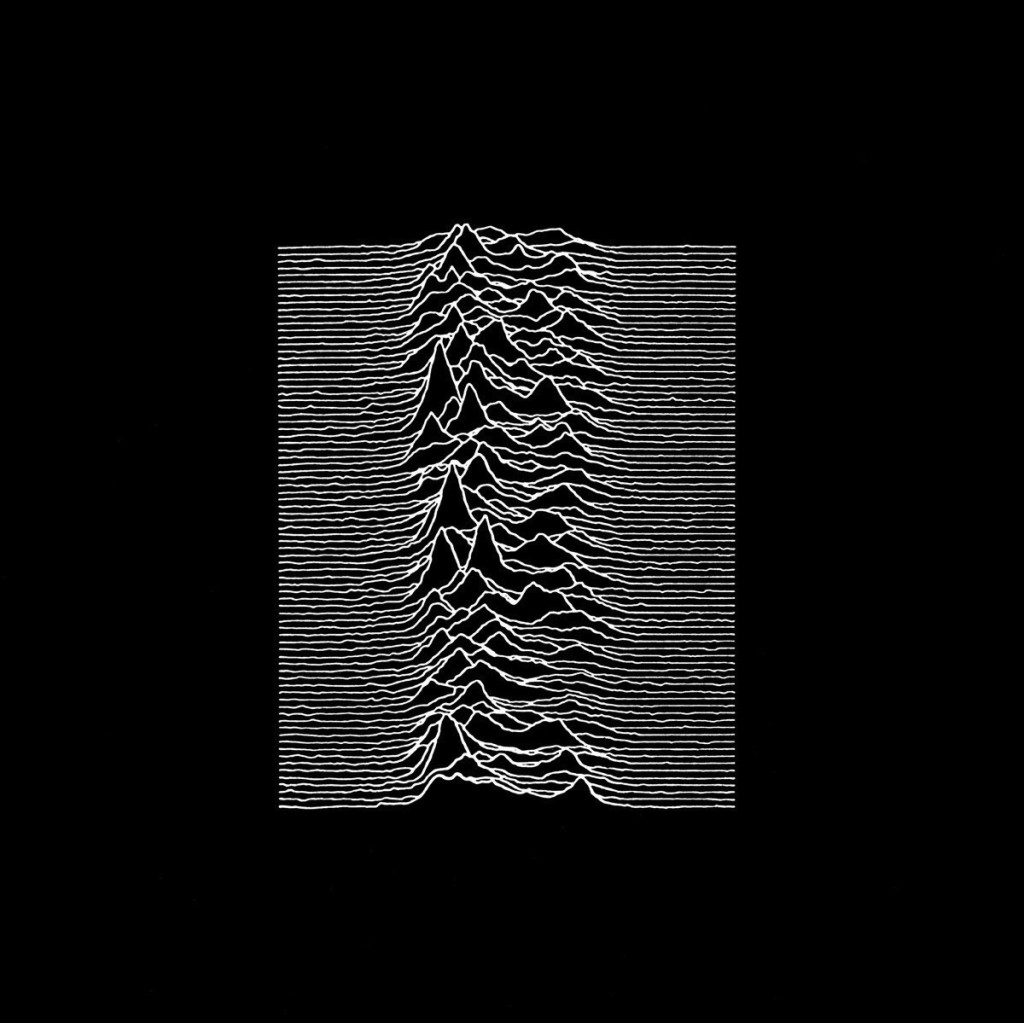
The artwork has been re-used and reprinted a lot and is still abundantly present as T-shirt at most music festivals.
But every time I saw this image I wondered… what do those white lines actually represent (if anything)? It turns out the story behind the white lines makes the artwork much cooler!
PSR B1919+21
At Cambridge University in 1967 a 24 year old student named Jocelyn Bell...
Paper sizes
Update Apr 22, 2016: I’ve made a video which explains most of what is in this blogpost:
Two standards
Yes, this blogpost is about paper. This has absolutely nothing to do with programming, but there is a beautiful piece of math involved.
There are two major standards of paper sizes in the world. The most widely used is ISO-216, more commonly known as the A-series, as in ‘A4’ size. This system is used almost everywhere in the world, the main exceptions are United States and Canada. In the United...

Shaved FAQ
What happened to your beard?
I shaved.
Have you lost a bet?
No.
Who are you? How did you get past security?
The same guy as last week and the months before that, I shaved, sorry to shock you, it happens.
Why did you grow a beard in the first place?
Because I felt like it.